基于细化算法的机器人磨削轨迹规划技术
成果名称 | 基于细化算法的机器人磨削轨迹规划技术 | |||||||
成果联系人 | 马凯威 | 职称 | 讲师 | 所在单位 | 英国威廉希尔公司官网 | |||
联系电话 | makaiwei@live.com | |||||||
技术成熟度 | 技术分类 | |||||||
核心专利号 | 无 | |||||||
所属学科方向 | 一级学科 | 机械工程 | 二级学科 | 无 | ||||
应用行业 | 航空航天、汽车制造、电气电子、卫浴五金和医疗手术等 | |||||||
项目概况: 目前,国内外具有复杂自由曲面的零件(如曲轴连杆、气门、高档水龙头等)的磨削都是采用手控机械砂带磨削的方法,即砂带磨削机和手持工件组合的方式。这种磨削方式不仅对操作者熟练程度有较高的要求,而且存在废品率高,劳动强度大,自动化水平低,产品差异性大,严重威胁员工的身体健康。而工业机器人砂带磨削系统通过配置工业机器人、砂带磨削机和系统控制柜等设备,除可以完全取代工人手工磨削,实现快速编程,连续工作,精确磨削等功能,还可以用于具有自由曲面复杂形状工件的自动化磨削作业。该系统提高了加工工件的合格率和加工效率,保证了产品质量的高度一致性。 研究资料表明,砂带磨削的本质问题就是工业机器人在自由曲面上的轨迹规划问题,即机器人的位姿控制和磨削轨迹的快速生成。由于工业机器人特有的构造方式,可靠的工作性能和强大的软件支持,使其完全具有解决工业机器人砂带磨削轨迹规划关键问题的能力。实际磨削加工生产也证明,在具有复杂自由曲面零件的磨削加工中,工业机器磨削相对人工磨削显得更加灵活、快捷、高效和准确。
| ||||||||
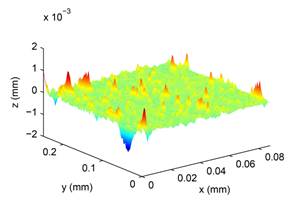
关键技术: 这种轨迹规划方法可以在零件三维模型上选取关键接触点,通过B样条曲线反算获得理论磨削估计。然后,利用相邻两点之间的曲率变化率和弧长准则,对关键接触点进行进一步细化,在工件表面曲率突变或者曲面相交的敏感区域生成目标点。最后,根据构造的双三次B样条曲线曲面方程的解,得到每个目标点位置的磨削方向。 为了验证方法的效果,以普通锻铸铜水龙头为对象,进行机器人砂带磨削试验,生成加工轨迹如图1所示,加工效果如图2所示,磨削后对应的轮廓形貌如图3所示。根据检测结果分析,该轨迹规划方法能将复杂自由曲面零件磨削后的表面粗糙度控制在0.086μm左右。
| ||||||||
应用领域和市场前景:
与传统机器人轨迹规划相比,该方法具有编程效率高,产品一致性好,复杂曲面零件适应性强等特点,可为航空航天、汽车制造、电气电子、卫浴五金和医疗手术等领域的磨削提供技术支持。
| ||||||||
合作方式(技术转让,技术开发,技术服务,技术咨询,技术入股):
*技术转让 *技术开发 *技术咨询 *技术服务 *技术入股 | ||||||||
图片:(1-5张,文件大小不低于1MB,图片清晰,并标注图片说明)
图1 基于细化算法机器人砂带磨削轨迹规划效果
图2 水龙头磨削前后效果对比图
图3 水龙头在泰勒霍普森轮廓仪下的表面形貌
| ||||||||